






La piovra robot stampata 3D
È il primo esempio di robot ''morbido'' completamente autonomo.
[ZEUS News - www.zeusnews.it - 26-08-2016]

Quando si pensa a un robot, generalmente le immagini che vengono in mente riguardano fili elettrici e longheroni di metallo.
Alcuni ricercatori dell'Università di Harvard hanno invece creato un robot "morbido" che ha l'aspetto di un polpo e funziona autonomamente senza bisogno di essere collegato ad apparecchiature esterne.
Robert Wood e Jennifer Lewis, a capo del progetto, hanno battezzato il robot Octobot e vanno particolarmente orgogliosi del risultato perché sinora i robot "morbidi" dovevano comunque avere parti non flessibili, come i chip di controllo e le batterie, oppure dovevano essere collegati a una sorgente esterna di energia.

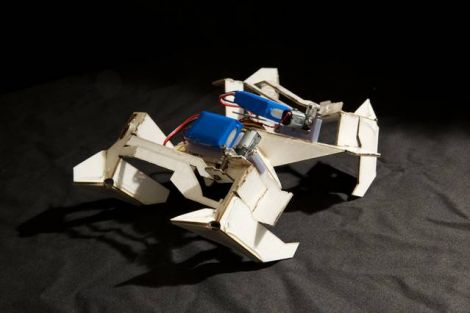

Il gruppo di Harvard ha invece dotato Octobot di un sistema pneumatico per la locomozione, alimentato a perossido di idrogeno che, quando incontra un catalizzatore di platino, si trasforma in vapore acqueo e ossigeno.
Questa reazione chimica fa espandere il composto, causando il movimento dei tentacoli di Octobot. A regolare i movimenti del robot non ci sono complessi chip ma un semplice oscillatore elettronico.
Anche il procedimento di costruzione del robot è particolare, dato che coinvolge tecniche di litografia, estrusione e stampa 3D: usando insieme tutti questi sistemi si è potuto dar vita a un progetto integrato che non deve essere assemblato poiché i vari componenti possono essere stampati tutti insieme.
Octobot, in sé, non fa nulla di utile a parte muoversi, nuotare e in generale interagire con l'ambiente circostante. È però un eccellente punto di partenza per cambiare il modo in cui sono concepiti e realizzati i robot: esso dimostra infatti che non è più necessario pensare a strutture rigide.
«Uno dei sogni a lungo termine nel campo della robotica "morbida" è sempre stato la creazione di robot completamente flessibili, ma abbiamo sempre avuto il problema di come sostituire i componenti rigidi come le batterie e l'elettronica di controllo» spiega Wood.
«La nostra ricerca» - continua lo scienziato - «dimostra che si possono facilmente costruire i componenti chiave di un semplice robot completamente flessibile, e ciò getta le basi per progetti più complessi».
|
Se questo articolo ti è piaciuto e vuoi rimanere sempre informato con Zeus News
ti consigliamo di iscriverti alla Newsletter gratuita.
Inoltre puoi consigliare l'articolo utilizzando uno dei pulsanti qui
sotto, inserire un commento
(anche anonimo)
o segnalare un refuso.
© RIPRODUZIONE RISERVATA |
|
Commenti all'articolo (0)
|
|
||






|















- Al caffe' dell'Olimpo:
[GIOCO] Associazioni di idee - Telefonia mobile:
problema con WhatsApp - Aiuto per i forum / La Posta di Zeus / Regolamento:
Server zeusnews lento - Linux:
Antix'22 - Multimedia:
AVS Video Editor - Goooooooooogle:
rendere un sito attendibile - Telefonia fissa:
Disattivare il telefono (ma non Internet) con
Tiscali Fibra - Pronto Soccorso Virus:
DISDOWN.COM - Windows 11, 10:
Avvio Lentissimo pc - Social network:
web.whatsapp quanto è affidabile?
